
Showing Posts From Robotics
Sensors in Robotics: How Ultrasonic, LiDAR, and IMU Work
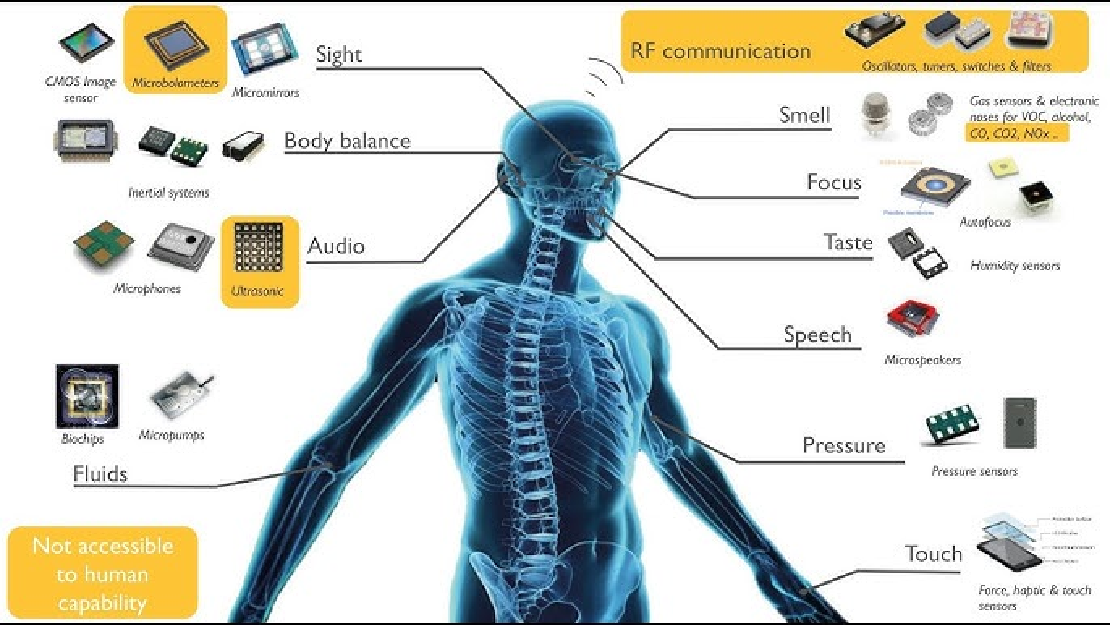
Sensors are to robots what eyes, ears, and skin are to humans—but with far fewer limits. While we rely on just five senses, robots can be equipped with many more, sensing distances, movement, vibrations, orientation, light intensity, and even chemical properties. These sensors form the bridge between the digital intelligence of a robot and the physical world it operates in.
Read more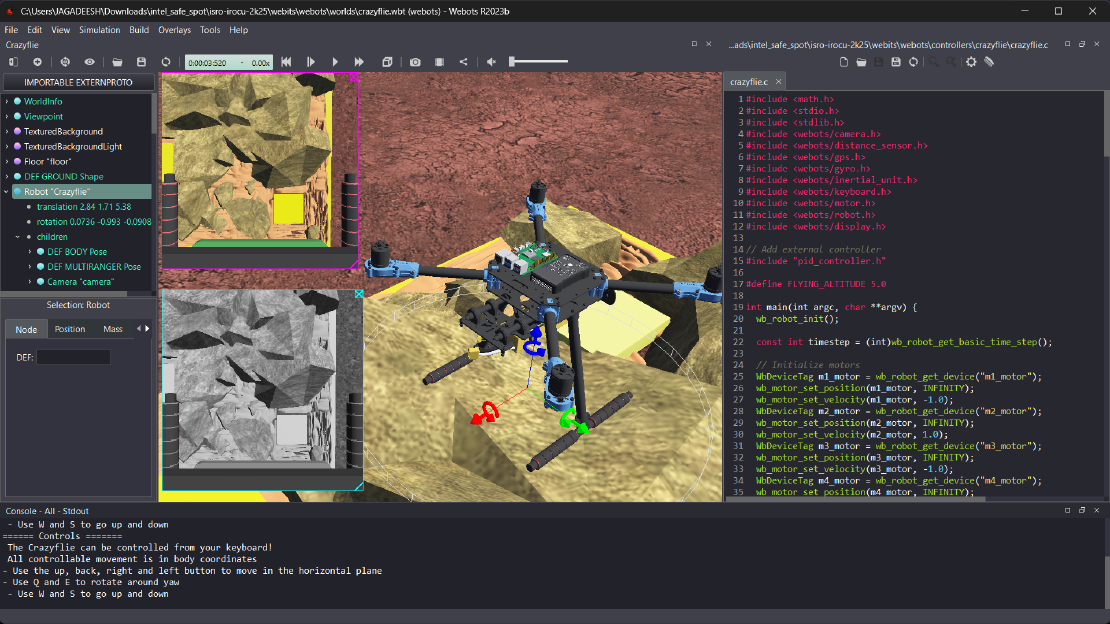
Debugging a Robot In Simulation Before You Burn Wires
Hardware does not come with an undo button. Once you power it on, mistakes—from reversed wiring to faulty code—can result in costly damage. Motors may overheat, printed circuit boards (PCBs) can be fried, and sensors may break. These issues turn exciting projects into frustrating repair sessions. The autonomous drone shown above, designed for GNSS-denied environments in webots as part of the ISRO Robotics Challenge, is a perfect example—where careful planning, testing, and hardware safety were critical at every step
Read more
Computer Vision vs. Sensor Fusion: Who Wins the Self-Driving Car Race?
Tesla’s bold claim that “humans drive with eyes and a brain, so our cars will too” sparked one of the most polarizing debates in autonomous vehicle (AV) technology: Can vision-only systems truly compete with—or even outperform—multi-sensor fusion architectures?
Read more
ROS 2 vs ROS 1: What Changed and Why It Matters?
Is ROS 1 still the right choice for your next robotics project, with its well-established tools and wide community support? Or, given the growing demand for real-time performance, scalability, and modern middleware, is it finally time to make the move to ROS 2?
Read more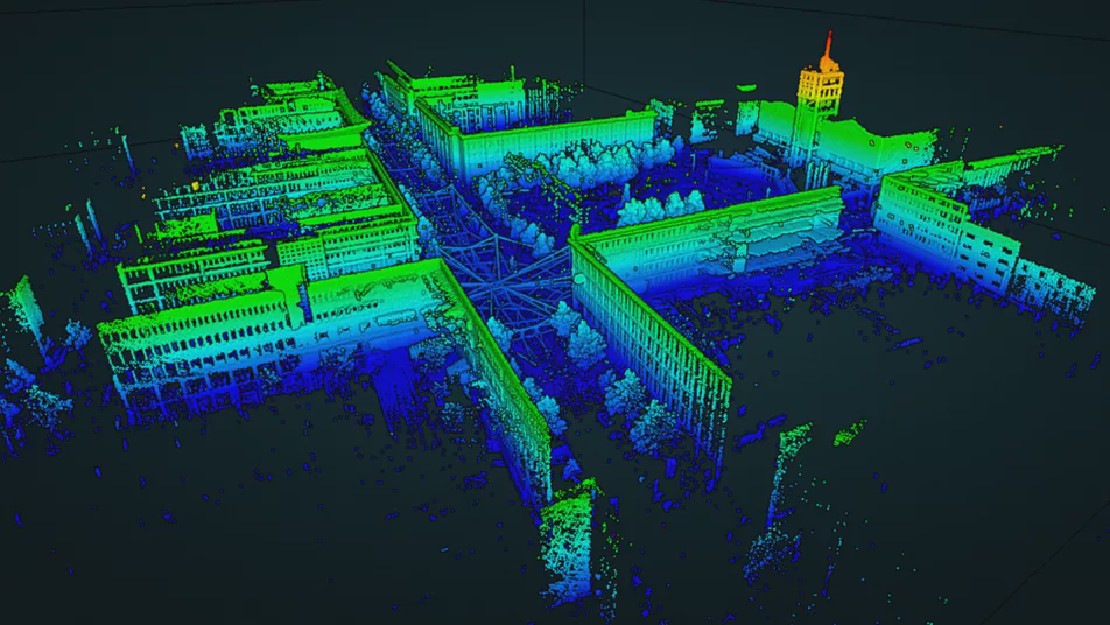
What is SLAM? And Why It’s the Brain of Mobile Robots
In robotics, SLAM—Simultaneous Localization and Mapping—is regarded as one of the most fundamental and complex problems. At its core, SLAM addresses a deceptively simple question: “Where am I, and what does the world around me look like?”
Read more
My RosConIN'24 (+GNOME Asia Summit) Experience
Last year, I missed ROSCon India due to exams and, honestly, had no idea what I was missing out on. This year, though, I made it, and it turned out to be more than I ever imagined. The two days I spent at ROSConIN'24 were nothing short of transformative, and this blog itself is a result of the inspiration I drew from the event.
Read more