

Autonomous Drone for GNSS-Denied Environments (ISRO IRoC-U 2025)
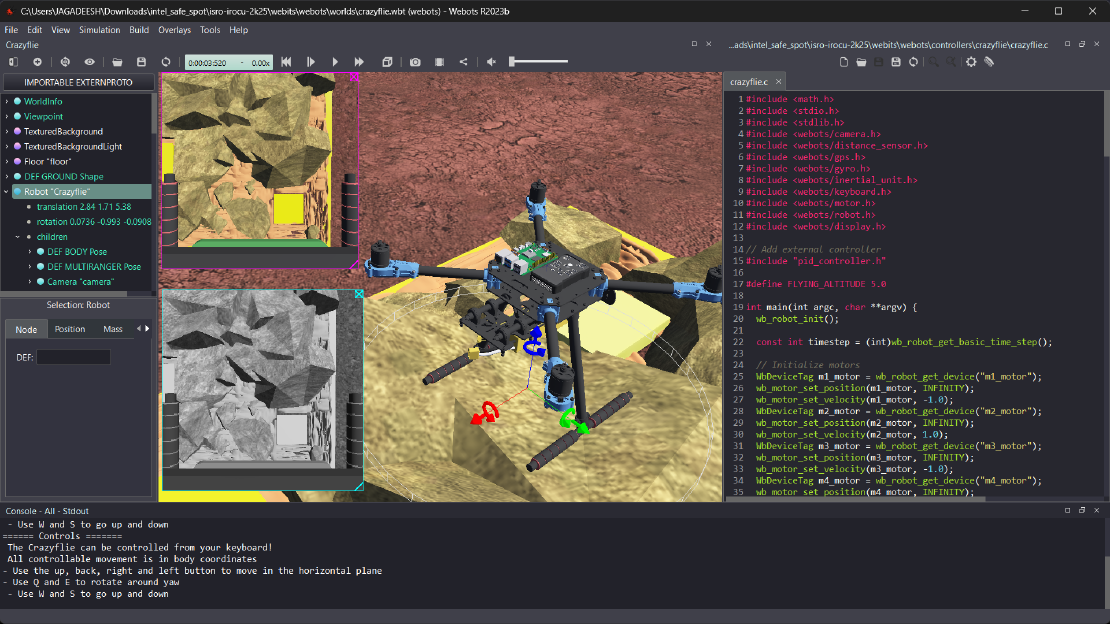
Simulation in Webots
View Project- Integrated NVIDIA Jetson Nano for onboard compute with Pixhawk 4 flight controller to enable autonomous navigation and precision landing
- Designed a sub-2 kg quadrotor optimized for GNSS-denied mapping, localization, and vision-based safe-zone detection
- Calibrated ESCs and implemented a stable 5 V / 3 A BEC power system; established bidirectional long-range telemetry using ESP32 (~500 m)
- Interfaced barometer, optical-flow, and stereo-vision sensors with Pixhawk over I2C and UART for fused state estimation = Implemented visual–inertial odometry using ORB-SLAM3 and VINS-Fusion on ROS 2, achieving ~5 m localization with <5 cm drift
- Simulated Mars-like no-GPS flight scenarios in Webots with 0.38 g gravity, enabling autonomous landings within 1.5 m × 1.5 m safe zones