
GPBOT - Basic Sensor based General Purpose AMR

Do checkout :
Basic Line Following Robot
Obstacle Avoidance Robot
Wall Follower Robot
Differential Drive Robot
| Name | GPBOT |
|---|---|
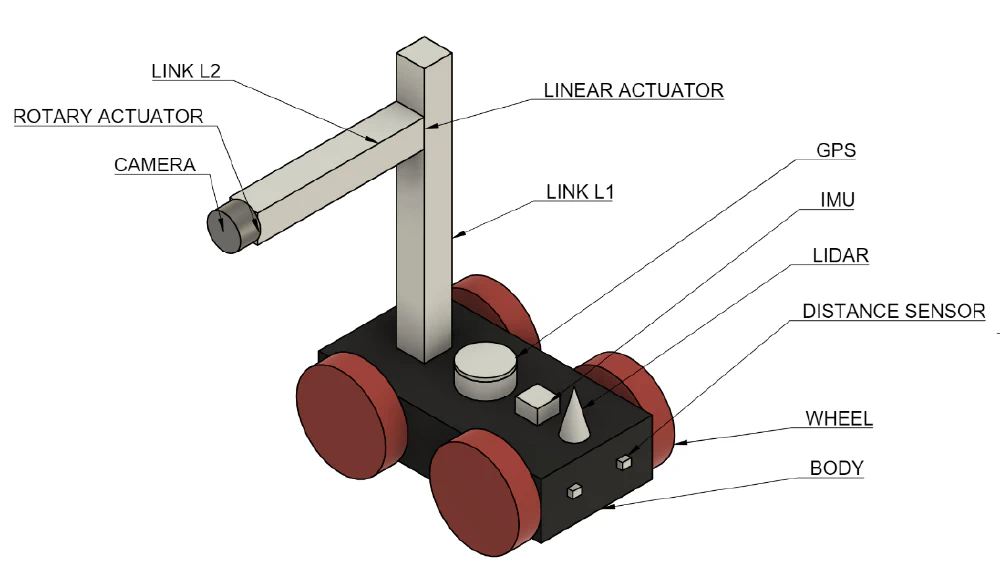
| Description | This 4-wheeled robot is equipped with GPS, IMU, LiDAR, Distance Sensors, and a 2-DOF camera (using linear and rotary actuators). It detects objects using computer vision, avoids obstacles, and navigates autonomously. |
| Start | June 2024 |
| Repository | GPBOT🔗 |
| Type | Individual |
| Level | Beginner |
| Skills | Simulation, Programming |
| Tools Used | Webots, Python |
| Current Status | On Hold |
Overview
The robot is equipped with GPS, IMU, LiDAR, and a 2-DOF camera, enabling it to detect objects using computer vision, avoid obstacles, and navigate autonomously.
Live Interaction
Interact with the robot in real-time via the following link:
Demo Videos
Explore the robot’s functionalities through these demo videos:
| Camera Test | Object Detection | LiDAR in Action |
|---|---|---|
Robot Overview
Features:
- 4-Wheeled Mobility: Designed for efficient movement in diverse environments.
- Sensor Suite:
- GPS: Provides global positioning and navigation.
- IMU: Tracks orientation and movement.
- LiDAR: Maps the surroundings and detects obstacles.
- 2-DOF Camera: Offers flexible vision capabilities with linear and rotary actuation.
- Autonomous Operation: The robot navigates without relying on complex algorithms, utilizing basic control mechanisms.
Controls
The following key mappings define the robot’s movement and camera operations:
Movement Controls
| Key | Action |
|---|---|
| ↑ | Move forward |
| ↓ | Move backward |
| ← | Turn left |
| → | Turn right |
Camera Controls
| Key | Action |
|---|---|
| W | Move camera up |
| S | Move camera down |
| A | Rotate camera left (ACW) |
| D | Rotate camera right (CW) |
Control Visualization
Movement
┌───┐┌───┐┌───┐
│ ← ││ ↑ ││ → │
│ ← │└───┘│ → │
│ ← │┌───┐│ → │
│ ← ││ ↓ ││ → │
└───┘└───┘└───┘
Camera
┌───┐
│ W │
└───┘
┌───┐┌───┐┌───┐
│ A ││ S ││ D │
└───┘└───┘└───┘
Implementation Details
The robot has been built from scratch, integrating multiple sensors to enhance its navigation and detection abilities.
- Camera Functionality: The 2-DOF camera captures images and analyzes the environment for object recognition.
- Object Detection: Using computer vision, the robot identifies and reacts to obstacles in its path.
Installation and Usage
Requirements
- Webots: Download and install Webots from here.
Setup Instructions
- Clone the repository:
git clone https://github.com/Mummanajagadeesh/gpbot-w.git cd gpbot-w - Open Webots and load the robot’s world file.
- Start the simulation to test the robot’s capabilities.
Future Enhancements
- Algorithm Integration: Implement advanced path planning and control algorithms.
- Enhanced Object Recognition: Utilize AI-based models for improved object detection.
- Multi-Robot Coordination: Develop cooperative strategies for multiple robots in a shared space.