
Basic Sensor-Based Mobile Robots
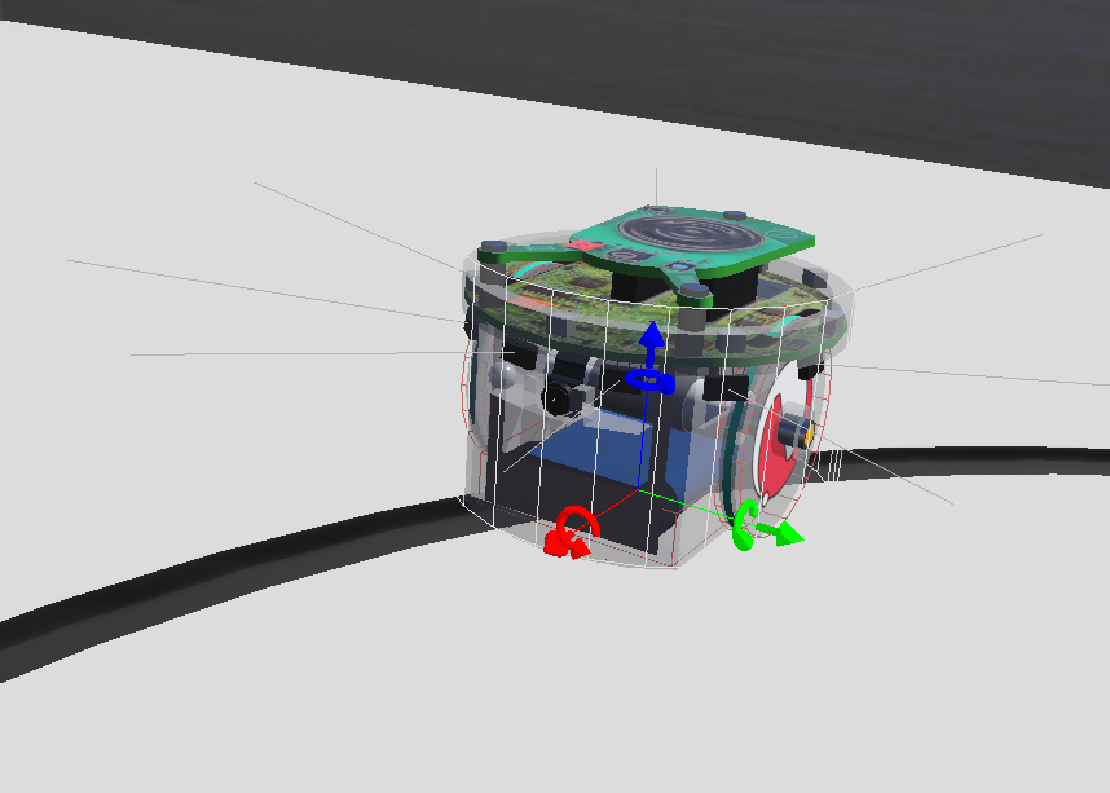
LFR - Basic Line Following Robot Simulation
This project features a robot that follows a line using basic sensors. It detects the line on the ground and adjusts its movement to stay on track. The robot can navigate turns and intersections without needing complex algorithms
View Project
Obstacle Avoidance Robot
A robot equipped with basic sensors that detects obstacles and changes direction to avoid collisions without using advanced algorithms
View Project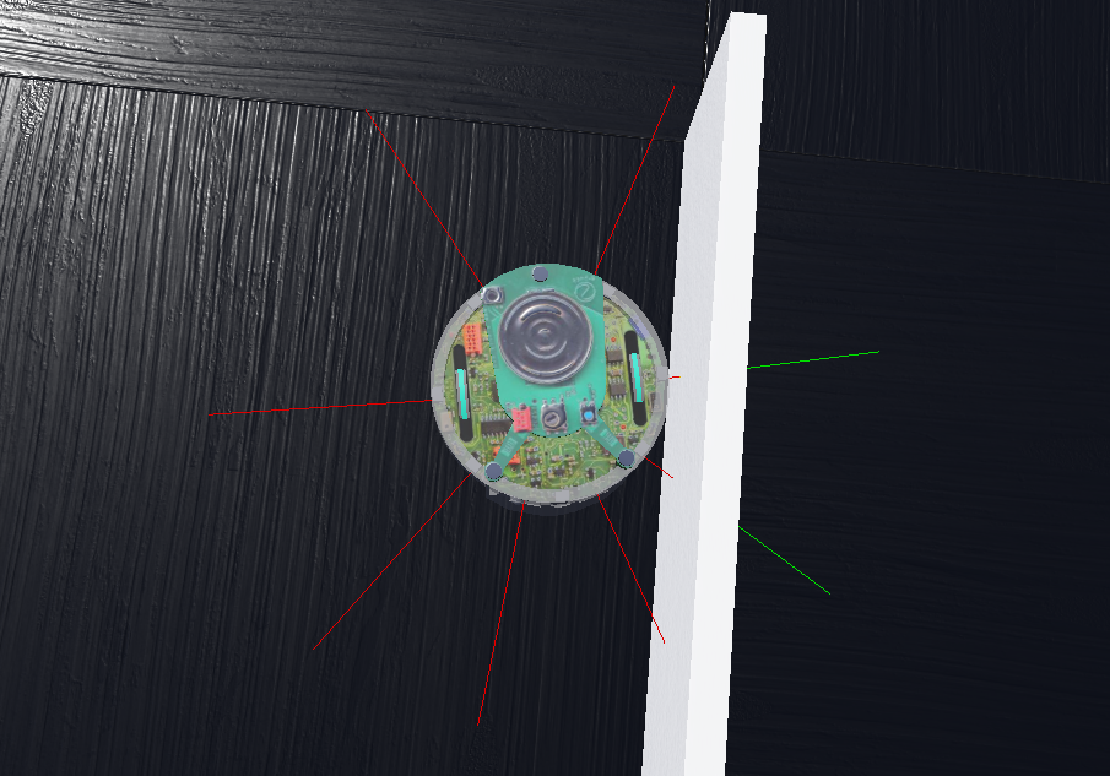
Wall Follower Robot
The wall-following robot travels along walls in a maze. It uses basic sensors to detect the distance to the wall and adjusts its path to stay close. The robot explores all possible paths to find its destination without relying on algorithms, simply following the wall as it moves
View Project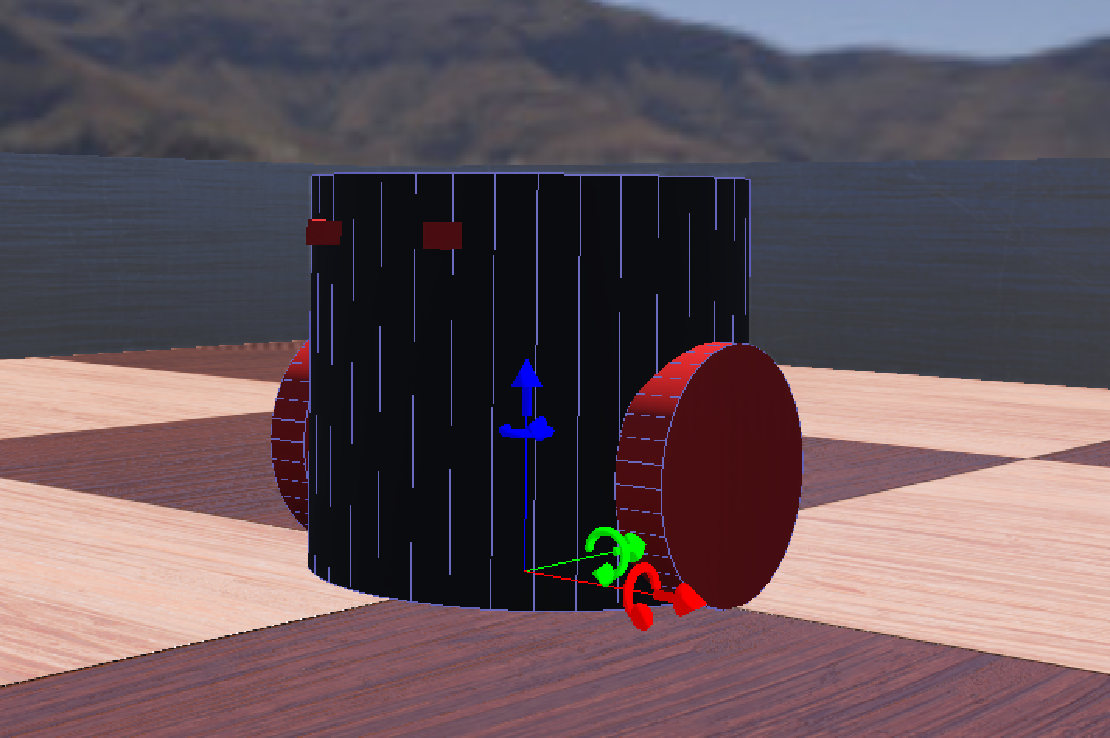
Differential Drive Robot
A custom-built robot featuring a differential drive system that calculates its position and movement based on wheel rotations
View ProjectNo projects found for the selected tags.




