
ANAV for Martian Surface Exploration
Challenge Overview
Problem statement, task breakdown across rounds, detailed technical requirements, hardware/software specs, arena setup, evaluation method, and all operational restrictions
View Project
Implementation
Designed autonomous drone for GNSS-denied navigation, safe spot detection, and landing | DOCUMENTATION PENDING
View Project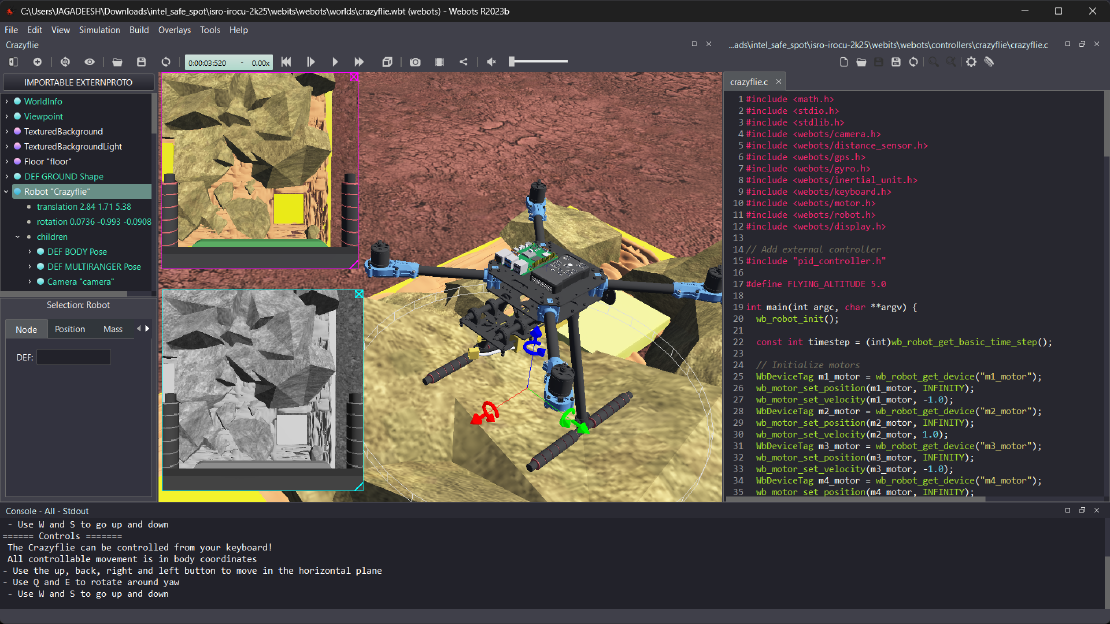
Virtual Simulation
Mars-like simulation environment for ANAV testing and prototyping using Webots
View ProjectNo projects found for the selected tags.
ANAV for Martian Surface Exploration
| Name | ISRO-ANAV |
|---|---|
| Description | The designed ANAV is a sub-2 kg rotorcraft built for GNSS-denied environments, capable of autonomous take-off, terrain scanning, safe landing, and return. It operates solely on battery power, uses RF communication, and integrates onboard sensing and navigation algorithms without external aids |
| Start | Dec 2024 |
| Repository | ISRO-ANAV🔗 |
| Type | Team ISRO (RIG) |
| Level | Intermediate |
| Skills | Aerial Robotics, Simulation, Programming |
| Tools Used | ROS2, VINS Fusion, ESP32, MissionPlanner, Webots, Python |
| Current Status | Ongoing |