
For complete official details and documentation, visit the ISRO IRoC-U2025.
IRoC-U 2025 – Technical Challenge Summary
Challenge Overview
Design and demonstrate an Autonomous Navigation System for an Aerial Vehicle (ANAV) that can function in a simulated Martian environment without any external navigation aids like GNSS, pseudolites, or reflectors.
Core Objectives:
Execute fully autonomous:
- Vertical take-off
- Terrain-based navigation
- Safe-spot detection and landing
- Return to home base
Navigation must rely solely on surface topography, not color or beacons.
Participants will not build the drone — they may use off-the-shelf rotorcrafts that meet DGCA regulations.
Arena Layout

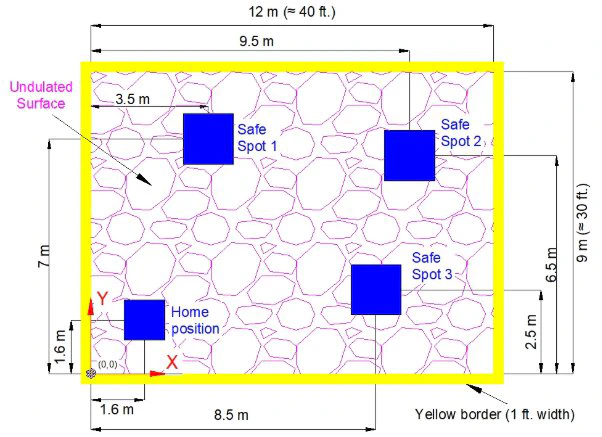
30 ft × 40 ft challenge arena with 1 ft yellow boundary.
The arena is designed to emulate Martian terrain using non-uniform, unstructured, and non-color-dependent topography, testing the drone’s ability to perceive, plan, and execute autonomous act
Arena Specifications:
- Dimensions: 30 ft × 40 ft (approx. 9.1 m × 12.2 m)
- Boundary: 1 ft wide yellow strip running along all edges for visual demarcation
- Flight Altitude: Min. 3 m; Max 6 m
- Enclosure: Optional netting around arena perimeter
Home Position & Landing Zones:
Home Pad: 4 ft × 4 ft flat platform at a fixed corner of the arena
Safe Landing Zones: Two or more 5 ft × 5 ft areas located within the arena
- At least one will have an inclined 15° slope
- Participants must demonstrate slope landing stability
Terrain Composition:
To mimic Martian surface irregularities, the arena floor will include:
- Loose sand and fine gravel
- Medium-sized pebbles and thermocol to simulate loose top layer
- Embedded boulders and raised undulations (1.5 ft to 2.5 ft high)
- Uneven terrain distribution, forcing real-time mapping and adaptation
The surface is not level. Drones will need to dynamically identify flat areas for landing using onboard sensors, not rely on color, GPS, or any pre-mapped coordinates.
Technical Requirements
ANAV System Specifications
| Parameter | Requirement |
|---|---|
| Aerial Vehicle Type | Rotorcraft / Micro Drone, Mass < 2 kg |
| Software | Navigation and control algorithms must be developed in-house |
| Power Source | Battery-operated only |
| Communication | RF-based only |
| Emergency Mode | Mandatory safe-landing feature on emergency trigger |
| Slope Handling | Must land safely on slopes of at least 15° |
| DGCA Compliance | Must follow DGCA rules |
Challenge Tasks
Common Across All Rounds
- Stable vertical take-off (3–10 m hover)
- Maintain hover for ≥30 seconds
- Arena scan and boundary detection
- Identify ≥1.5 m² safe landing zones
- Land at multiple safe spots
- Return to home location
- Real-time telemetry: X, Y, Z, velocities, battery, and safe-spot coordinates
Navigation Modes
| Mode | Description |
|---|---|
| Manual Mode | Controlled via base station (e.g., laptop/controller) |
| Autonomous | Executes navigation tasks autonomously on command |
| Safe Mode | Automatically activated on emergencies (e.g., low battery, signal loss) |
Challenge Rounds
1. Preliminary Round
Submit proposal (≤15MB) outlining:
- Concept
- Technical approach
- Innovation
Proposal score: 10/100 (rest to be announced)
Only 1 team per institute, with HoI approval
2. Qualification Round
Tasks:
- Take-off from 1.2 m × 1.2 m home location
- Hover at 3–10 m height for ≥30 sec
- Land within the same zone
- Demonstrate emergency-safe landing
Deliverables:
- HD videos with clear timestamps
- Complete ANAV design documentation
- Recordings must be at the institution site
3. Elimination Round
Arena: 30 ft × 40 ft, bordered by 1 ft yellow strip
Home Pad: 4 ft × 4 ft flat surface
Landing Zones: 5 ft × 5 ft, at least one with 15° slope
Terrain: Uneven with 1.5–2.5 ft high undulations made from:
- Sand
- Gravel
- Thermocol
- Small boulders
Netting around arena is optional
Flight altitude: Minimum 3 m (upper bound unspecified)
4. Field Round (URSC Bengaluru)
- Same configuration as Elimination Round
- Added requirement: Return to original home zone after final landing
Glossary
| Term | Definition |
|---|---|
| Home Position | Initial 1.5 m² area where drone starts and must return |
| Safe Spot | ≥1.5 m² flat zone with slope <15° for safe landing |
| Base Station | Manual control system (typically a laptop/controller) |
| Telemetry | Real-time data: position, height, velocities, battery, and safe-spot coordinates |
Prohibited & Mandatory Rules
- No GNSS, reflectors, pseudolites, or external positioning systems
- Must comply with DGCA and Ministry of Civil Aviation rules
- Only the first team per institute will be accepted into the competition